|
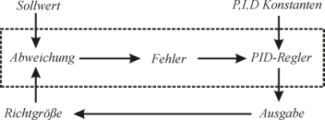
Die Arbeit des PID-Regelkreises besteht darin, den
Ausgabewert so einzustellen, dass der gewünschte Sollwert ohne
Abweichung erreicht wird. Der PID-Regler misst die Abweichung zwischen
Richtgröße und Sollwert sowie die
zeitliche Entwicklung dieser Abweichung. Der PID-Regler soll dabei schnell
auf Änderungen reagieren können, die sowohl durch Änderungen in der
Richtgröße oder des Sollwertes zustande kommen können.
Sobald der PID-Regler die Richtgröße an den Sollwert angepasst hat,
sollte ein guter Regler den Ausgabewert nicht weiter verändern, sondern
auf einem konstanten Niveau belassen. Dadurch kommt es zu einer
deutlichen Verringerung des Verschleiß des Ausgabegeräts. Den erfassten
Fehler zwischen gemessenem Wert und Sollwert kann man auf drei Arten
beschreiben: Der absolute Wert ist die Abweichung zwischen
Regelgröße und Sollwert und der proportionale
Anteil des PID-Reglers. Die
Summe des Fehlers über die Zeit ist der integrale Bestandteil des
PID-Reglers. Warum er wichtig ist, wird im weiteren erläutert.
Die Totzeit ist die Zeit, die zwischen einer Änderung des
Ausgabewertes und einer beobachtbaren Änderung der Richtgröße vergeht.
Sie ist die differentielle Komponente des PID-Reglers.
|
|